Project Name: Cup Toppler/Walker
Controlled by: Programming
Programming Difficulty: Medium
Construction Difficulty: Medium-hard
General Comment. This is more challenging than it looks, especially when no wheels are allowed.
Controlled by: Programming
Programming Difficulty: Medium
Construction Difficulty: Medium-hard
General Comment. This is more challenging than it looks, especially when no wheels are allowed.
Rules FOR STUDENTS
You must use:
-1 NXT or EV brick
-Up to 3 motors
-1 ultrasonic sensor
-No Wheels!
You must:
Build a robot that can travel around a table-top or board without falling off. It needs to WALK, (not roll on wheels). It needs to knock up to 8 plastic cups off the table.
Your robot cannot measure more than 30 cm in any direction
Tips For students
Tip: stretching a tyre around some bricks might give your walking robot better traction.
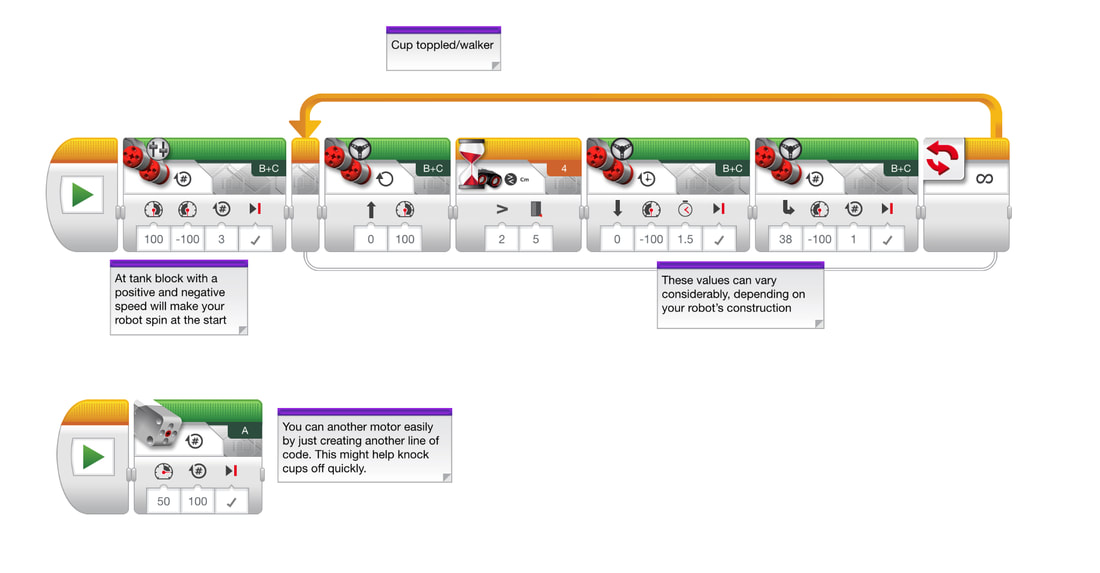
SAMPLE PROGRAMMING
TEACHER INFO
Grading option: The quicker the time, the better the grade.
If you are timing each robot, make a copy of this Google Sheet to help you score